产品别名 |
CCD视觉定位,机器人视觉引导定位,汽车零部件视觉定位,视觉检测系统 |
面向地区 |
全国 |
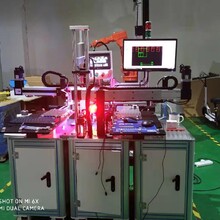
机器人视觉引导定位简述
实现汽车压铸件的准确定位,需要的视觉识别技术。通过采用高分辨率相机、的图像处理算法和深度学习技术,能够提高压铸件特征识别的准确性和鲁棒性,即使在复杂的生产环境下也能快速、准确地定位压铸件
机械臂:是执行抓取任务的核心部件,通常具有多个自由度,能够在三维空间内灵活移动,以准确地到达压铸件的位置并进行抓取。常见的有六轴机械臂,可实现复杂的运动轨迹。
末端执行器:也称为抓手,是直接与压铸件接触并完成抓取动作的部件。根据压铸件的形状、尺寸和重量等特点,末端执行器有多种类型,如气动夹爪、液压夹爪、磁吸式抓手等。
视觉系统:由相机、光源、图像处理单元等组成。相机负责采集压铸件的图像信息,光源用于照亮压铸件,以提高图像质量。图像处理单元则对采集到的图像进行分析和处理,识别压铸件的位置、姿态等信息。
控制系统:是整个定位抓取系统的 “大脑”,负责协调机械臂、末端执行器和视觉系统等各个部件的工作。它根据视觉系统提供的信息,计算出机械臂的运动轨迹和抓取动作,然后向各个部件发送控制指令,实现的定位抓取。
1. 产品的二维、三维测量(CCD视觉检测/CCD视觉定位,连接器/接插件检测,高速冲压检测);
2. 产品颜色、外观的检测与识别(表面缺陷检测,颜色识别,线材/线束安装次序检测,字符条码二维码检测);
3. 软件配合自动化设备的机器视觉(光学影像筛选机,载带高速冲压检测,全自动视觉检测包装机);
4. 研发、设计、制造非标自动化机器;
5. 为相关视觉检测需求者提供的解决方案。
最近来访记录