




产品别名 |
西门子软启动器 |
面向地区 |
品牌 |
SIEMENS/西门子 |
|
产地 |
德国 |
产品认证 |
IOS9001 |
加工定制 |
否 |
计量单位 |
件 |
售后服务 |
店面三包 |
额定电压 |
6V |
软启动器3RW3027-1BB14型号简介
PLC功能指令实现高压变频器PID闭环控制
用户现场对变频器闭环控制提出的要求是:变频器能够根据用户系统用水量的变化,自动调整变频泵的转速,实现管网恒压供水;同时还可以在液晶屏上设定压力目标值。
束语
高压变频器自动旁路柜采用PLC进行旁路逻辑控制,通过在攀钢污水处理厂运行的智光高压变频器模拟故障说明,高压变频器自动旁路柜在从变频转工频,工频转变频的相互切换非常方便,能在10s以内完成,大大提高了水泵运行的可靠性。现场PID闭环控制效果非常理想,水压波动非常小,波动在超过0.1kg时,变频器能迅速调节转速,把水压控制在设定范围内,调节转速时不会产生任何振荡。同时通过PLC与高压变频器控制器的串口RS-232通信,在高压变频器液晶屏上能监视系统管网水压及PLC各种状态量。
其具体编程过程是这样:PLC读取指令(FROM)读取用户水压反馈值,把反馈值用移动指令(MOV)存入PID指令中的D12数据地址里; 把用户的水压设定值用移动指令(MOV)存入PID指令中的D10数据地址里;D200~D222保存PID的运行参数;D14为PID指令的运算值输出,通过PLC的写入指令(TO)把PID闭环运算结果D14写入模拟输出模块,再通过模拟输出模块转换成-10V~10V或者4~20mA的模拟信号送入高压变频器控制器进行频率设定。
针对用户的要求,PLC另外配置了模拟特殊模块FX2N-4AD和FX2N-2DA。FX2N-4AD为模拟输入模块,有四个输入通道,大分辨力12位,模拟值输入范围为-10V~10V或者4~20mA;FX2N-2DA为模拟输出模块,有2个输出通道,大分辨力12位,模拟值输出值范围为-10V到10V或者4到20 mA。这样通过读取指令(FROM)和写入指令(TO),以及PLC带有的PID闭环控制功能指令(如图3所示),就可以实现对用户现场的管网水压进行PID闭环控制。
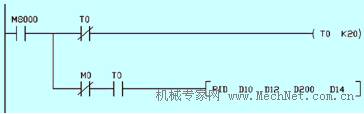
图3 带有的PID闭环控制功能指令的PLC 程序
软启动器3RW3027-1BB14型号简介
在进行PID运行参数设置时,P、I、D的参数设定尤其重要,其设定的好坏直接关系到管网水压控制的好坏。P表示比例增益,设定范围为0~99(%),比例调节设定大,系统出现偏差时,可以加快调节,减少误差,但是过大的比例增益,会造成系统不稳定;I表示积分时间,设定范围为0~32767(*100ms),积分时间越小,积分作用就越强,反之I越大则积分作用弱;D表示
针对用户的要求,PLC另外配置了模拟特殊模块FX2N-4AD和FX2N-2DA。FX2N-4AD为模拟输入模块,有四个输入通道,大分辨力12位,模拟值输入范围为-10V~10V或者4~20mA;FX2N-2DA为模拟输出模块,有2个输出通道,大分辨力12位,模拟值输出值范围为-10V到10V或者4到20 mA。这样通过读取指令(FROM)和写入指令(TO),以及PLC带有的PID闭环控制功能指令(如图3所示),就可以实现对用户现场的管网水压进行PID闭环控制。
(4)PLC功能指令实现PLC与变频器上位机通信
为了使变频器上位机能对PLC进行显示、报警及记录,PLC还配置了通信模块FX2N-232BD,实现与变频器上位机的串口通信,通信编程指令如图4所示。
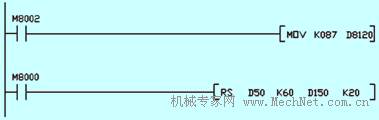
图4 通信编程指令
PLC RS232串口通信可使用无协议(RS指令)或协议与上位机进行通信,本例中使用无协议与上位机进行通信,如图四所示:D8120用于设定PLC通信格式,D50表示发送起始地址,K60表示发送字节数量,D150表示接收起始地址,K20表示接收字节数量。
4、结束语
高压变频器自动旁路柜采用PLC进行旁路逻辑控制,通过在攀钢污水处理厂运行的智光高压变频器模拟故障说明,高压变频器自动旁路柜在从变频转工频,工频转变频的相互切换非常方便,能在10s以内完成,大大提高了水泵运行的可靠性。现场PID闭环控制效果非常理想,水压波动非常小,波动在超过0.1kg时,变频器能迅速调节转速,把水压控制在设定范围内,调节转速时不会产生任何振荡。同时通过PLC与高压变频器控制器的串口RS-232通信,在高压变频器液晶屏上能监视系统管网水压及PLC各种状态量。
微分时间,设定范围为0~32767(*10ms),微分调节有的控制作用,合适的微分时间能改善系统的动态性能。
攀钢污水处理厂供水管网比较庞大,管网水压对水泵转速的变化响应比较缓慢, 因此PID的计算速度不能过快,即比例调节不能过快,否则如果管网水压突然变化大时,变频器的调节容易形成较长时间的振荡。根据这一情况,如图3所示,可以在PLC控制程序中加入PID间隔计算时间 (T0)以及PID运算死区(M0),这样就可以把PID的计算速度调节至与管网水压变化速度相一致,避免管网水压震荡。
最近来访记录








