




关键词 |
传统汽车传感器试验台,宁波汽车传感器试验台,汽车传感器试验台,汽车传感器试验台 |
面向地区 |
全国 |
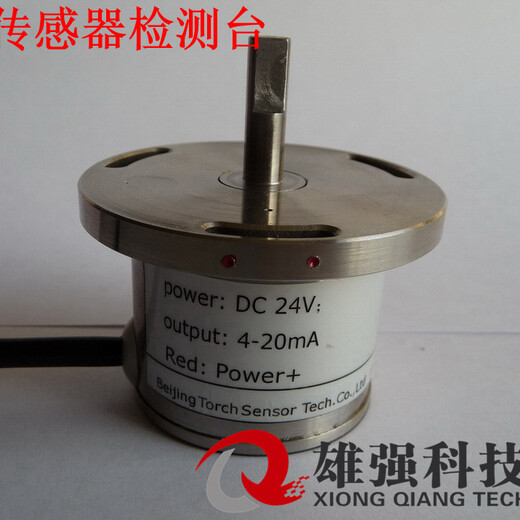
集电极开路输出,输出低电平UL<1.5V
输出脉冲信号占空比0.3T≤t≤0.7T
输出脉冲信号,上升沿时间TR≤15us,下降延迟时间TF≤3.5us
信号频率范围0Hz~1000Hz
输出灌电流≤15mA
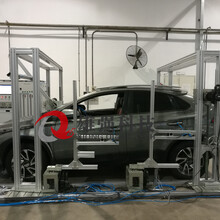
试验方法:将被测样件放置在温度箱内,保持被测样件处于正常工作状态(带载工作),调节温度箱内温度,将温度箱内温度设置为-40℃,保持1小时,逐步升高温度箱内温度至105℃后保持1小时,计为一个工作循环,要求在温度调节过程中,温度转换速率≥3k/min,总计进行360个循环
评价标准:在试验中和试验后,被测样件均能正常工作
手动设置转角角度、角速度,检测被测转角传感器输出;
手动设置起始角度、测试间隔角度、大测试角度(达到大角度后反转)、循环数),通过CAN总线接收数据,检测传感器输出;
手动设置起始角速度值、角速度增量、大角速度、达到大角速度后以相同增量值,通过CAN总线接收数据,检测传感器输出;
自动设置转角角度、角速度,检测被测转角传感器输出
自动按转角传感器技术规范要求的测试点设置测试转角、角速度,通过CAN总线检测传感器输出。
传感器标定
按磁传感器标定要求,完成标定。
转角
转角范围:-800°— +800°(可调)
角度分辨率:0.1°
角度精度:±0.5º
角速度
角速度测量范围:0 ~3000º/s(其中0~1600º/s精度要求如下,1600º/s~3000º/s不作精度要求)
角速度分辨率:1º/s
角速度精度:±5º/s
具体改善措施方案及目标:
改进措施:引用负压抗干扰技术降低通讯误码率。
改进目标:车速传感器解决误判问题。
改进基础:经模拟整车情况现有传感器与仪表通讯系统抗零点漂移能力仅0.6V,采用新线路的传感器与仪表通讯的抗零飘能力提升到2.5V。